Getting Started#
Here we go through a complete rocket trajectory simulation to get you started.
Also, a more in detail complete description of the simulation can also be found in the First Simulation Section of the RocketPy Documentation.
If you want, you can open this notebook in Google Colab by clicking the badge below.
![]()
Let’s start by importing the rocketpy module.
[1]:
%load_ext autoreload
%autoreload 2
[2]:
from rocketpy import Environment, Flight, Rocket, SolidMotor
If you are using Jupyter Notebooks, it is recommended to run the following line to make matplotlib plots which will be shown later interactive and higher quality.
[ ]:
%matplotlib widget
Setting Up a Simulation#
Creating an Environment for Spaceport America#
The Environment class is used to define the atmosphere, the winds, and the gravity models.
You can find more information about the Environment class in the Environment Class Usage Docs.
[4]:
env = Environment(latitude=32.990254, longitude=-106.974998, elevation=1400)
To get weather data from the GFS forecast, available online, we run the following lines.
First, we set tomorrow’s date.
[5]:
import datetime
tomorrow = datetime.date.today() + datetime.timedelta(days=1)
env.set_date(
(tomorrow.year, tomorrow.month, tomorrow.day, 12)
) # Hour given in UTC time
Then, we tell env to use a GFS forecast to get the atmospheric conditions for flight.
Don’t mind the warning, it just means that not all variables, such as wind speed or atmospheric temperature, are available at all altitudes given by the forecast.
[6]:
env.set_atmospheric_model(type="Forecast", file="GFS")
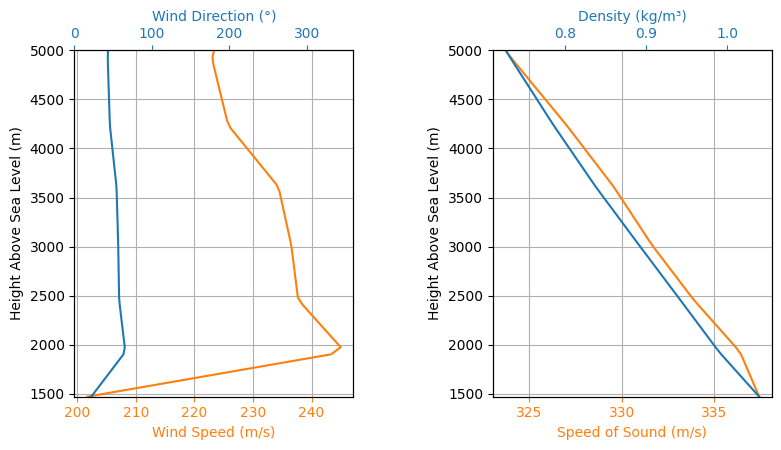
We can see what the weather will look like by calling the info method!
[7]:
env.max_expected_height = 5000 # adjust the plots to this height
env.info()
Gravity Details
Acceleration of gravity at surface level: 9.7911 m/s²
Acceleration of gravity at 5.000 km (ASL): 9.7802 m/s²
Launch Site Details
Launch Date: 2024-11-03 12:00:00 UTC
Launch Site Latitude: 32.99025°
Launch Site Longitude: -106.97500°
Reference Datum: SIRGAS2000
Launch Site UTM coordinates: 315468.64 W 3651938.65 N
Launch Site UTM zone: 13S
Launch Site Surface Elevation: 1471.5 m
Atmospheric Model Details
Atmospheric Model Type: Forecast
Forecast Maximum Height: 5.000 km
Forecast Time Period: from 2024-11-02 06:00:00 to 2024-11-18 06:00:00 utc
Forecast Hour Interval: 3 hrs
Forecast Latitude Range: From -90.0° to 90.0°
Forecast Longitude Range: From 0.0° to 359.75°
Surface Atmospheric Conditions
Surface Wind Speed: 201.65 m/s
Surface Wind Direction: 21.65°
Surface Wind Heading: 4.31°
Surface Pressure: 845.29 hPa
Surface Temperature: 283.30 K
Surface Air Density: 1.039 kg/m³
Surface Speed of Sound: 337.42 m/s
Earth Model Details
Earth Radius at Launch site: 6371.83 km
Semi-major Axis: 6378.14 km
Semi-minor Axis: 6356.75 km
Flattening: 0.0034
Atmospheric Model Plots
Creating a Motor#
A solid rocket motor is used in this case. To create a motor, the SolidMotor class is used and the required arguments are given.
The SolidMotor class requires the user to have a thrust curve ready. This can come either from a .eng file for a commercial motor, such as below, or a .csv file from a static test measurement.
Besides the thrust curve, other parameters such as grain properties and nozzle dimensions must also be given.
See Solid Motor Class Usage Docs for more information.
[8]:
# IMPORTANT: modify the file path below to match your own system
Pro75M1670 = SolidMotor(
thrust_source="../../data/motors/cesaroni/Cesaroni_M1670.eng",
dry_mass=1.815,
dry_inertia=(0.125, 0.125, 0.002),
nozzle_radius=33 / 1000,
grain_number=5,
grain_density=1815,
grain_outer_radius=33 / 1000,
grain_initial_inner_radius=15 / 1000,
grain_initial_height=120 / 1000,
grain_separation=5 / 1000,
grains_center_of_mass_position=0.397,
center_of_dry_mass_position=0.317,
nozzle_position=0,
burn_time=3.9,
throat_radius=11 / 1000,
coordinate_system_orientation="nozzle_to_combustion_chamber",
)
Pay special attention to position related parameters: More details on Positions and Coordinate Systems
To see what our thrust curve looks like, along with other import properties, we invoke the info method yet again. You may try the all_info method if you want more information all at once!
[9]:
Pro75M1670.info()
Nozzle Details
Nozzle Radius: 0.033 m
Nozzle Throat Radius: 0.011 m
Grain Details
Number of Grains: 5
Grain Spacing: 0.005 m
Grain Density: 1815 kg/m3
Grain Outer Radius: 0.033 m
Grain Inner Radius: 0.015 m
Grain Height: 0.12 m
Grain Volume: 0.000 m3
Grain Mass: 0.591 kg
Motor Details
Total Burning Time: 3.9 s
Total Propellant Mass: 2.956 kg
Average Propellant Exhaust Velocity: 2038.745 m/s
Average Thrust: 1545.218 N
Maximum Thrust: 2200.0 N at 0.15 s after ignition.
Total Impulse: 6026.350 Ns

Creating a Rocket#
A rocket is composed of several components. Namely, we must have a motor (good thing we have the Pro75M1670 ready), a couple of aerodynamic surfaces (nose cone, fins and tail) and parachutes (if we are not launching a missile).
You can find more information about the Rocket class in the Rocket Class Usage Docs.
Let’s start by initializing our rocket, named Calisto, entering inertia properties, some dimensions and drag curves.
Pay special attention to position related parameters: More details on Positions and Coordinate Systems
[10]:
# IMPORTANT: modify the file paths below to match your own system
calisto = Rocket(
radius=127 / 2000,
mass=14.426,
inertia=(6.321, 6.321, 0.034),
power_off_drag="../../data/rockets/calisto/powerOffDragCurve.csv",
power_on_drag="../../data/rockets/calisto/powerOnDragCurve.csv",
center_of_mass_without_motor=0,
coordinate_system_orientation="tail_to_nose",
)
rail_buttons = calisto.set_rail_buttons(
upper_button_position=0.0818,
lower_button_position=-0.618,
angular_position=45,
)
To add the motor to our rocket we need only inform what motor we are adding (Pro75M1670) and inform the position, in meters, of the motor’s nozzle exit area relative to the previously defined coordinate system.
[11]:
calisto.add_motor(Pro75M1670, position=-1.255)
Adding Aerodynamic Surfaces#
Now we define the aerodynamic surfaces. They are really straight forward with special attention needed only for the position values. Here is a quick guide:
The positions given must be relative to the same coordinate system as the rockets;
Position of the Nosecone refers to the tip of the nose;
Position of fins refers to the point belonging to the root chord which is highest in the rocket coordinate system;
Position of the tail the point belonging to the tail which is highest in the rocket coordinate system.
See more details in Positions and Coordinate Systems
[12]:
nose_cone = calisto.add_nose(length=0.55829, kind="vonKarman", position=1.278)
# IMPORTANT: modify the file path below to match your own system
fin_set = calisto.add_trapezoidal_fins(
n=4,
root_chord=0.120,
tip_chord=0.060,
span=0.110,
position=-1.04956,
cant_angle=0,
airfoil=("../../data/airfoils/NACA0012-radians.txt", "radians"),
)
tail = calisto.add_tail(
top_radius=0.0635, bottom_radius=0.0435, length=0.060, position=-1.194656
)
To see all information regarding the rocket we just defined we run:
[13]:
calisto.all_info()
Inertia Details
Rocket Mass: 14.426 kg (without motor)
Rocket Dry Mass: 16.241 kg (with unloaded motor)
Rocket Loaded Mass: 19.197 kg
Rocket Inertia (with unloaded motor) 11: 7.864 kg*m2
Rocket Inertia (with unloaded motor) 22: 7.864 kg*m2
Rocket Inertia (with unloaded motor) 33: 0.036 kg*m2
Rocket Inertia (with unloaded motor) 12: 0.000 kg*m2
Rocket Inertia (with unloaded motor) 13: 0.000 kg*m2
Rocket Inertia (with unloaded motor) 23: 0.000 kg*m2
Geometrical Parameters
Rocket Maximum Radius: 0.0635 m
Rocket Frontal Area: 0.012668 m2
Rocket Distances
Rocket Center of Dry Mass - Center of Mass without Motor: 0.105 m
Rocket Center of Dry Mass - Nozzle Exit: 1.150 m
Rocket Center of Dry Mass - Center of Propellant Mass: 0.753 m
Rocket Center of Mass - Rocket Loaded Center of Mass: 0.116 m
Aerodynamics Lift Coefficient Derivatives
Nose Cone Lift Coefficient Derivative: 2.000/rad
Fins Lift Coefficient Derivative: 6.280/rad
Tail Lift Coefficient Derivative: -1.061/rad
Center of Pressure
Nose Cone Center of Pressure position: 0.999 m
Fins Center of Pressure position: -1.100 m
Tail Center of Pressure position: -1.223 m
Stability
Center of Mass position (time=0): -0.221 m
Center of Pressure position (time=0): -0.500 m
Initial Static Margin (mach=0, time=0): 2.199 c
Final Static Margin (mach=0, time=burn_out): 3.112 c
Rocket Center of Mass (time=0) - Center of Pressure (mach=0): 0.279 m
Rocket Draw
----------------------------------------

Mass Plots
----------------------------------------


Aerodynamics Plots
----------------------------------------
Drag Plots
--------------------

Stability Plots
--------------------


Thrust-to-Weight Plot
----------------------------------------

Adding Parachutes#
Finally, we have parachutes! Calisto will have two parachutes, Drogue and Main. The Drogue parachute will open at apogee while the Main parachute will open at 800m above ground level
For more details see Adding Parachutes
[14]:
Main = calisto.add_parachute(
"Main",
cd_s=10.0,
trigger=800,
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
Drogue = calisto.add_parachute(
"Drogue",
cd_s=1.0,
trigger="apogee",
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
Just be careful if you run this last cell multiple times! If you do so, your rocket will end up with lots of parachutes which activate together, which may cause problems during the flight simulation. We advise you to re-run all cells which define our rocket before running this, preventing unwanted old parachutes. Alternatively, you can run the following lines to remove parachutes.
Calisto.parachutes.remove(Drogue)
Calisto.parachutes.remove(Main)
Simulating a Flight#
Simulating a flight trajectory is as simple as initializing a Flight class object givin the rocket and environnement set up above as inputs. The launch rail inclination and heading are also given here.
[15]:
test_flight = Flight(
rocket=calisto, environment=env, rail_length=5.2, inclination=85, heading=0
)
Analyzing the Results#
RocketPy gives you many plots, thats for sure! They are divided into sections to keep them organized. Alternatively, see the Flight class documentation to see how to get plots for specific variables only, instead of all of them at once.
[16]:
test_flight.all_info()
Initial Conditions
Initial time: 0.000 s
Position - x: 0.00 m | y: 0.00 m | z: 1471.47 m
Velocity - Vx: 0.00 m/s | Vy: 0.00 m/s | Vz: 0.00 m/s
Attitude (quaternions) - e0: 0.923 | e1: -0.040 | e2: 0.017 | e3: 0.382
Euler Angles - Spin φ : 45.00° | Nutation θ: -5.00° | Precession ψ: 0.00°
Angular Velocity - ω1: 0.00 rad/s | ω2: 0.00 rad/s | ω3: 0.00 rad/s
Initial Stability Margin: 2.199 c
Surface Wind Conditions
Frontal Surface Wind Speed: 3.52 m/s
Lateral Surface Wind Speed: -1.95 m/s
Launch Rail
Launch Rail Length: 5.2 m
Launch Rail Inclination: 85.00°
Launch Rail Heading: 0.00°
Rail Departure State
Rail Departure Time: 0.368 s
Rail Departure Velocity: 26.207 m/s
Rail Departure Stability Margin: 2.276 c
Rail Departure Angle of Attack: 8.910°
Rail Departure Thrust-Weight Ratio: 10.152
Rail Departure Reynolds Number: 1.959e+05
Burn out State
Burn out time: 3.900 s
Altitude at burn out: 2130.814 m (ASL) | 659.348 m (AGL)
Rocket speed at burn out: 280.038 m/s
Freestream velocity at burn out: 280.618 m/s
Mach Number at burn out: 0.837
Kinetic energy at burn out: 6.368e+05 J
Apogee State
Apogee Time: 26.074 s
Apogee Altitude: 4820.548 m (ASL) | 3349.082 m (AGL)
Apogee Freestream Speed: 22.482 m/s
Apogee X position: -241.851 m
Apogee Y position: 297.248 m
Apogee latitude: 32.9929268°
Apogee longitude: -106.9775909°
Parachute Events
Parachute: Drogue
Ejection time: 26.076 s
Inflation time: 27.576 s
Freestream speed at inflation: 26.642 m/s
Altitude at inflation: 4809.715 m (ASL) | 3349.081 m (AGL)
Parachute: Main
Ejection time: 159.162 s
Inflation time: 160.662 s
Freestream speed at inflation: 18.225 m/s
Altitude at inflation: 2244.225 m (ASL) | 800.113 m (AGL)
Impact Conditions
Time of impact: 296.719 s
X impact: 2510.886 m
Y impact: 2351.825 m
Altitude impact: 1471.466 m (ASL) | 0.000 m (AGL)
Latitude: 33.0113988°
Longitude: -106.9480734°
Vertical velocity at impact: -5.534 m/s
Number of parachutes triggered until impact: 2
Stability Margin
Initial Stability Margin: 2.199 c at 0.00 s
Out of Rail Stability Margin: 2.276 c at 0.37 s
Maximum Stability Margin: 3.682 c at 3.90 s
Minimum Stability Margin: 2.199 c at 0.00 s
Maximum Values
Maximum Speed: 286.134 m/s at 3.38 s
Maximum Mach Number: 0.853 Mach at 3.39 s
Maximum Reynolds Number: 2.044e+06 at 3.33 s
Maximum Dynamic Pressure: 4.050e+04 Pa at 3.35 s
Maximum Acceleration During Motor Burn: 105.252 m/s² at 0.15 s
Maximum Gs During Motor Burn: 10.733 g at 0.15 s
Maximum Acceleration After Motor Burn: 11.077 m/s² at 15.81 s
Maximum Gs After Motor Burn: 1.130 Gs at 15.81 s
Maximum Stability Margin: 3.682 c at 3.90 s
Maximum Upper Rail Button Normal Force: 1.593 N
Maximum Upper Rail Button Shear Force: 0.970 N
Maximum Lower Rail Button Normal Force: 2.811 N
Maximum Lower Rail Button Shear Force: 1.553 N
Numerical Integration Settings
Maximum Allowed Flight Time: 600.00 s
Maximum Allowed Time Step: inf s
Minimum Allowed Time Step: 0.00e+00 s
Relative Error Tolerance: 1e-06
Absolute Error Tolerance: [0.001, 0.001, 0.001, 0.001, 0.001, 0.001, 1e-06, 1e-06, 1e-06, 1e-06, 0.001, 0.001, 0.001]
Allow Event Overshoot: True
Terminate Simulation on Apogee: False
Number of Time Steps Used: 731
Number of Derivative Functions Evaluation: 370
Average Function Evaluations per Time Step: 0.506
Trajectory 3d Plot

Trajectory Kinematic Plots

Angular Position Plots

Path, Attitude and Lateral Attitude Angle plots

Trajectory Angular Velocity and Acceleration Plots

Aerodynamic Forces Plots

Rail Buttons Forces Plots

Trajectory Energy Plots

Trajectory Fluid Mechanics Plots

Trajectory Stability and Control Plots

Rocket and Parachute Pressure Plots

Parachute: Main



Parachute: Drogue



Export Flight Trajectory to a .kml file so it can be opened on Google Earth
[17]:
test_flight.export_kml(
file_name="trajectory.kml",
extrude=True,
altitude_mode="relative_to_ground",
)
File trajectory.kml saved with success!
Using Simulation for Design#
Here, we go through a couple of examples which make use of RocketPy in cool ways to help us design our rocket.
Apogee as a Function of Mass#
This one is a classic one! We always need to know how much our rocket’s apogee will change when our payload gets heavier.
[18]:
from rocketpy.utilities import apogee_by_mass
apogee_by_mass(flight=test_flight, min_mass=5, max_mass=20, points=10, plot=True)

[18]:
'Function from R1 to R1 : (Rocket Mass without motor (kg)) → (Apogee AGL (m))'
Out of Rail Speed as a Function of Mass#
Lets make a really important plot. Out of rail speed is the speed our rocket has when it is leaving the launch rail. This is crucial to make sure it can fly safely after leaving the rail. A common rule of thumb is that our rocket’s out of rail speed should be 4 times the wind speed so that it does not stall and become unstable.
[19]:
from rocketpy.utilities import liftoff_speed_by_mass
liftoff_speed_by_mass(flight=test_flight, min_mass=5, max_mass=20, points=10, plot=True)

[19]:
'Function from R1 to R1 : (Rocket Mass without motor (kg)) → (Out of Rail Speed (m/s))'
Dynamic Stability Analysis#
Ever wondered how static stability translates into dynamic stability? Different static margins result in different dynamic behavior, which also depends on the rocket’s rotational inertial.
Let’s make use of RocketPy’s helper class called Function to explore how the dynamic stability of Calisto varies if we change the fins span by a certain factor.
[20]:
# Helper class
import copy
from rocketpy import Function
# Prepare a copy of the rocket
calisto2 = copy.deepcopy(calisto)
# Prepare Environment Class
custom_env = Environment()
custom_env.set_atmospheric_model(type="custom_atmosphere", wind_v=-5)
# Simulate Different Static Margins by Varying Fin Position
simulation_results = []
for factor in [-0.5, -0.2, 0.1, 0.4, 0.7]:
# Modify rocket fin set by removing previous one and adding new one
calisto2.aerodynamic_surfaces.pop(-1)
fin_set = calisto2.add_trapezoidal_fins(
n=4,
root_chord=0.120,
tip_chord=0.040,
span=0.100,
position=-1.04956 * factor,
)
# Simulate
print(
"Simulating Rocket with Static Margin of {:1.3f}->{:1.3f} c".format(
calisto2.static_margin(0),
calisto2.static_margin(calisto2.motor.burn_out_time),
)
)
test_flight = Flight(
rocket=calisto2,
environment=custom_env,
rail_length=5.2,
inclination=90,
heading=0,
max_time_step=0.01,
max_time=5,
terminate_on_apogee=True,
verbose=True,
)
# Store Results
static_margin_at_ignition = calisto2.static_margin(0)
static_margin_at_out_of_rail = calisto2.static_margin(test_flight.out_of_rail_time)
static_margin_at_steady_state = calisto2.static_margin(test_flight.t_final)
simulation_results += [
(
test_flight.attitude_angle,
"{:1.2f} c | {:1.2f} c | {:1.2f} c".format(
static_margin_at_ignition,
static_margin_at_out_of_rail,
static_margin_at_steady_state,
),
)
]
Function.compare_plots(
simulation_results,
lower=0,
upper=1.5,
xlabel="Time (s)",
ylabel="Attitude Angle (deg)",
)
Simulating Rocket with Static Margin of 0.113->0.846 c
Current Simulation Time: 5.0000 s
>>> Simulation Completed at Time: 5.0000 s
Simulating Rocket with Static Margin of 1.064->1.796 c
Current Simulation Time: 5.0000 s
>>> Simulation Completed at Time: 5.0000 s
Simulating Rocket with Static Margin of 2.014->2.747 c
Current Simulation Time: 5.0000 s
>>> Simulation Completed at Time: 5.0000 s
Simulating Rocket with Static Margin of 2.964->3.697 c
Current Simulation Time: 5.0000 s
>>> Simulation Completed at Time: 5.0000 s
Simulating Rocket with Static Margin of 3.914->4.647 c
Current Simulation Time: 5.0000 s
>>> Simulation Completed at Time: 5.0000 s

Characteristic Frequency Calculation#
Here we analyze the characteristic frequency of oscillation of our rocket just as it leaves the launch rail. Note that when we ran test_flight.all_info(), one of the plots already showed us the frequency spectrum of our flight. Here, however, we have more control of what we are plotting.
[21]:
import matplotlib.pyplot as plt
import numpy as np
# Simulate first 5 seconds of Flight
flight = Flight(
rocket=calisto,
environment=env,
rail_length=5.2,
inclination=90,
heading=0,
max_time_step=0.01,
max_time=5,
)
# Perform a Fourier Analysis
Fs = 100.0
# sampling rate
Ts = 1.0 / Fs
# sampling interval
t = np.arange(1, 400, Ts) # time vector
ff = 5
# frequency of the signal
y = flight.attitude_angle(t) - np.mean(flight.attitude_angle(t))
n = len(y) # length of the signal
k = np.arange(n)
T = n / Fs
frq = k / T # two sides frequency range
frq = frq[range(n // 2)] # one side frequency range
Y = np.fft.fft(y) / n # fft computing and normalization
Y = Y[range(n // 2)]
# Create the plot
fig, ax = plt.subplots(2, 1)
ax[0].plot(t, y)
ax[0].set_xlabel("Time")
ax[0].set_ylabel("Signal")
ax[0].set_xlim((0, 5))
ax[0].grid()
ax[1].plot(frq, abs(Y), "r") # plotting the spectrum
ax[1].set_xlabel("Freq (Hz)")
ax[1].set_ylabel("|Y(freq)|")
ax[1].set_xlim((0, 5))
ax[1].grid()
plt.subplots_adjust(hspace=0.5)
plt.show()
