Positions and Coordinate Systems#
In many classes, you will need to specify a “position”. This must always be treated with care, as the position is always relative to the coordinate system which is in use.
Essentially, in every class that uses positions, you will need to choose the
position of the coordinate system origin. All positions must then be relative
to this origin. The orientation of the coordinate system is also important,
and must be specified by the coordinate_system_orientation parameter.
Note
The coordinate system origin never needs to be explicitly specified, but all positions of that class must be relative to the same origin.
Here we go through the different classes that use positions, and how to specify the coordinate system origin and orientation.
Rocket#
When defining a rocket, two position related parameters are required:
center_of_mass_without_motor: The position of the center of mass of the rocket, relative to the coordinate system origin.coordinate_system_orientation: The orientation of the coordinate system. Can either benose_to_tailortail_to_nose.
See also
You can find more information about these parameters in
rocketpy.Rocket.__init__
Here we will go through a few examples of how to specify the coordinate system origin and orientation.
Example with Origin at Arbitrary Point#
The coordinate system origin can be at any point.
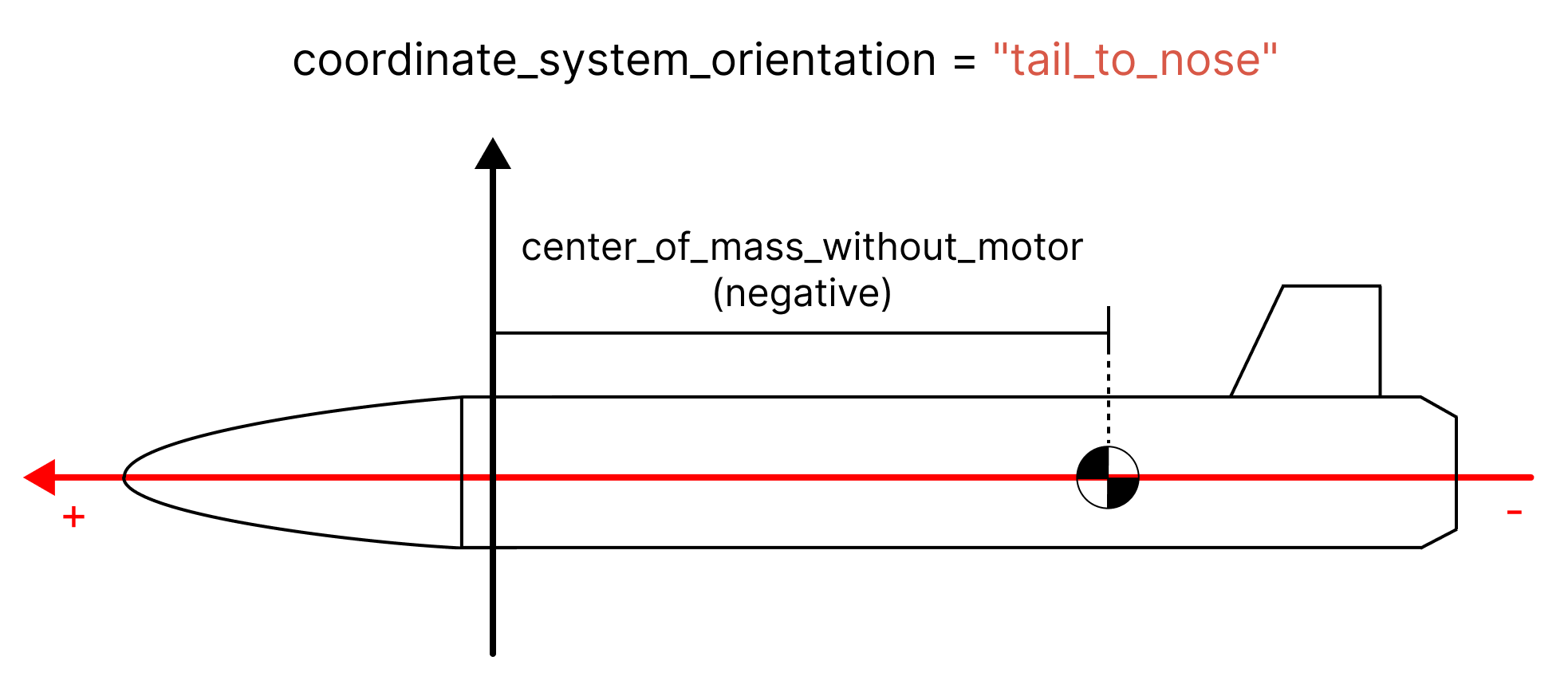
Here is an explanatory image of a rocket with the coordinate system origin at
an arbitrary point and the coordinate_system_orientation = tail_to_nose:
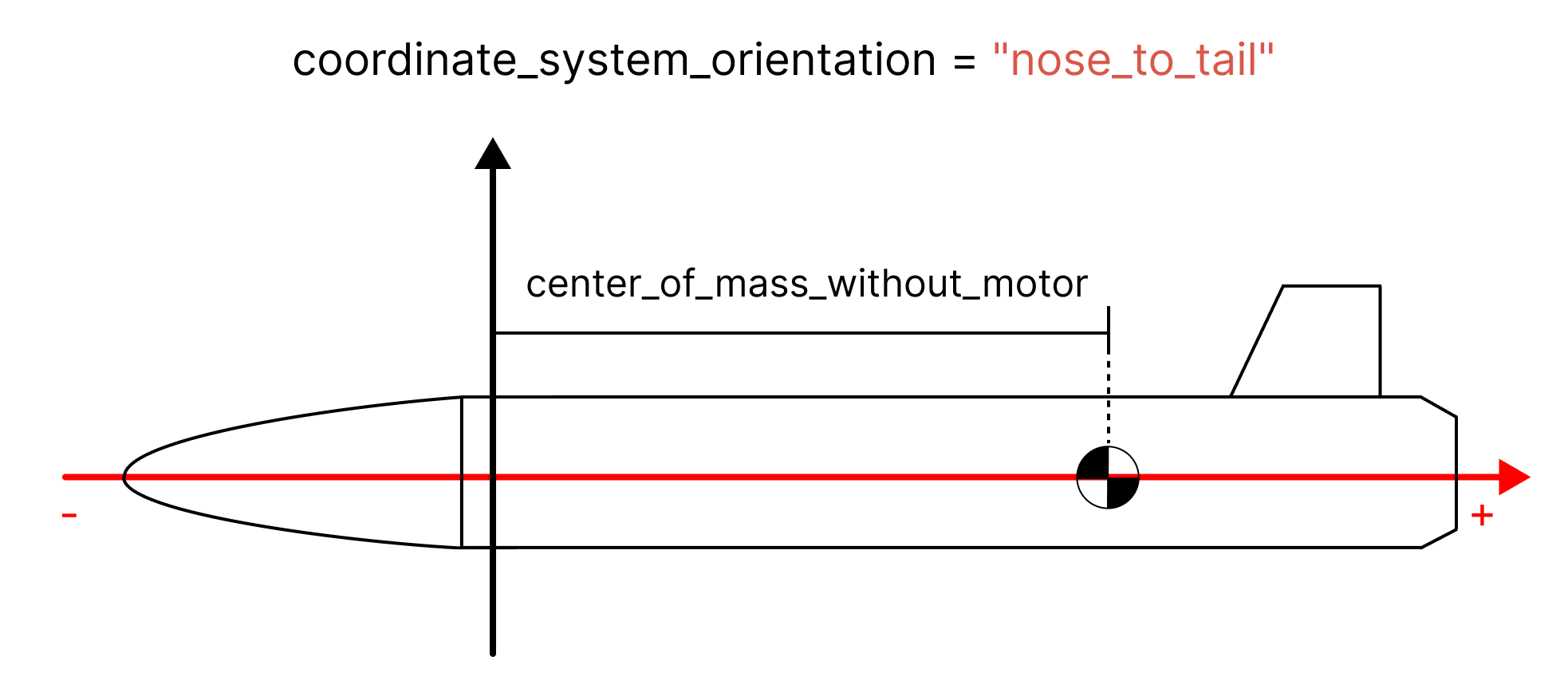
And with coordinate_system_orientation = nose_to_tail:
Important
The coordinate system origin is the point where the axes intersect. This point is not explicitly specified and can be chosen by the user. All positions given by the user must be relative to this point.
The coordinate system origin does not need to be inside the rocket. It can be outside the rocket.
When
coordinate_system_orientation = tail_to_nose(the default), we have that, in this example,center_of_mass_without_motoris negative.When
coordinate_system_orientation = nose_to_tail, thecenter_of_mass_without_motoris positive.
Example with Origin at Tip of Nose Cone#
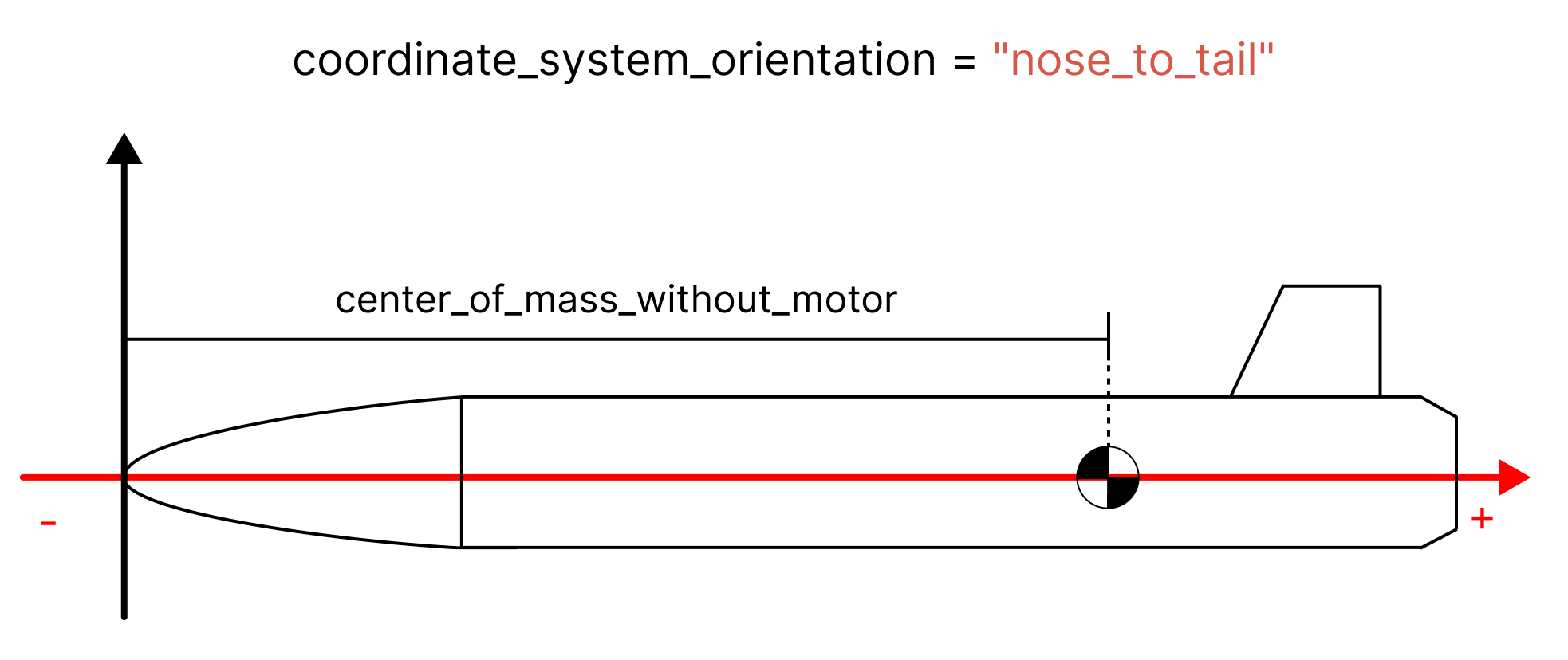
A more useful example is to have the coordinate system origin at the tip of the nose cone. Here is an explanatory image of a rocket with the coordinate system origin at the tip of the nose cone:
Important
The coordinate system origin is at the tip of the nose cone. This point is not explicitly specified and can be chosen by the user. All positions given by the user must be relative to this point.
Since the coordinate system origin is at the tip of the nose cone, the position of the nose cone is zero.
We are using the
nose_to_tailcoordinate system orientation. This means that thecenter_of_mass_without_motoris positive.
Example with Origin at the Center of Mass#
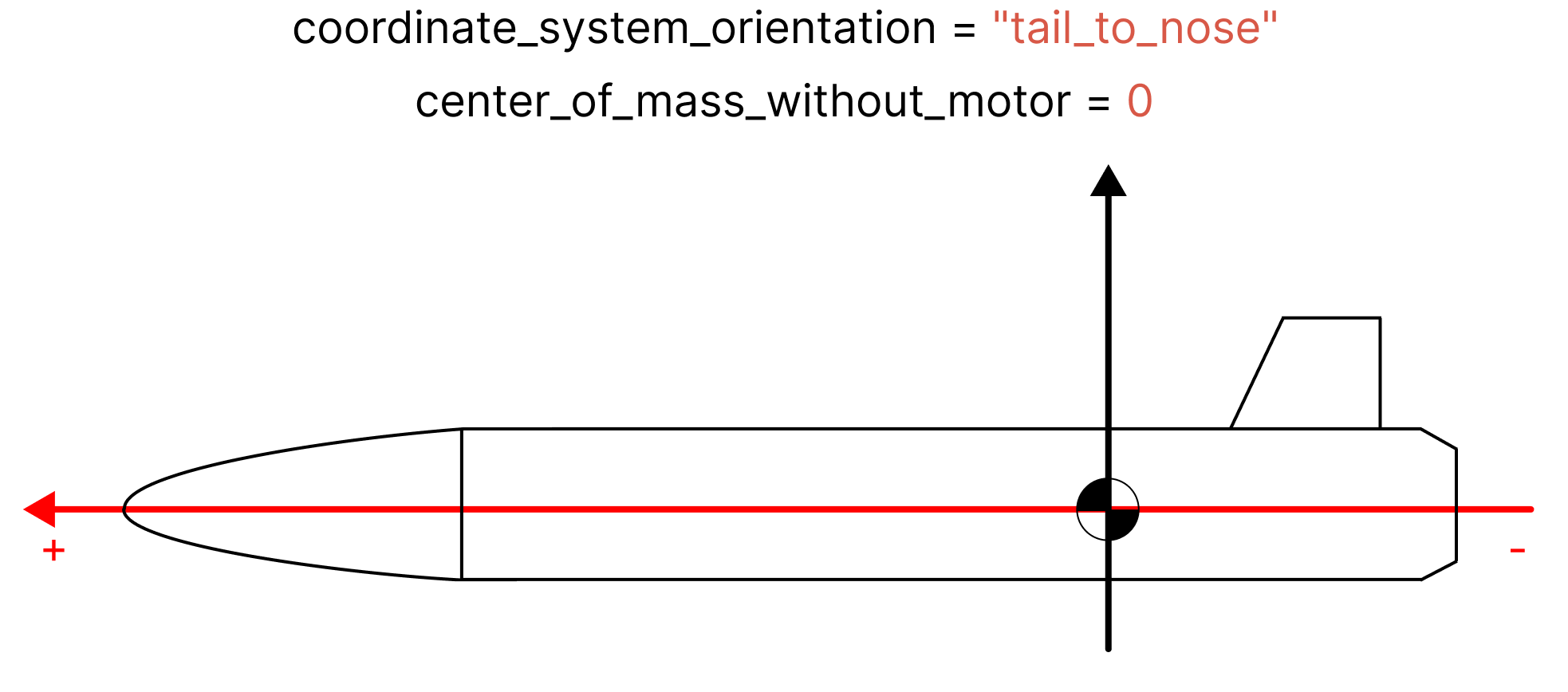
Another useful example is to have the coordinate system origin at the center of mass without motor of the rocket. Here is an explanatory image of a rocket with the coordinate system origin at the center of mass without motor:
Important
The coordinate system origin is at the center of mass without motor. This point is not explicitly specified and can be chosen by the user. All positions given by the user must be relative to this point.
Since the coordinate system origin is at the center of mass without motor, the position of the
center_of_mass_without_motoris zero.We are using the
tail_to_nosecoordinate system orientation. This means that the position of the nose cone is positive.
Adding Aerodynamic Surfaces and Motor#
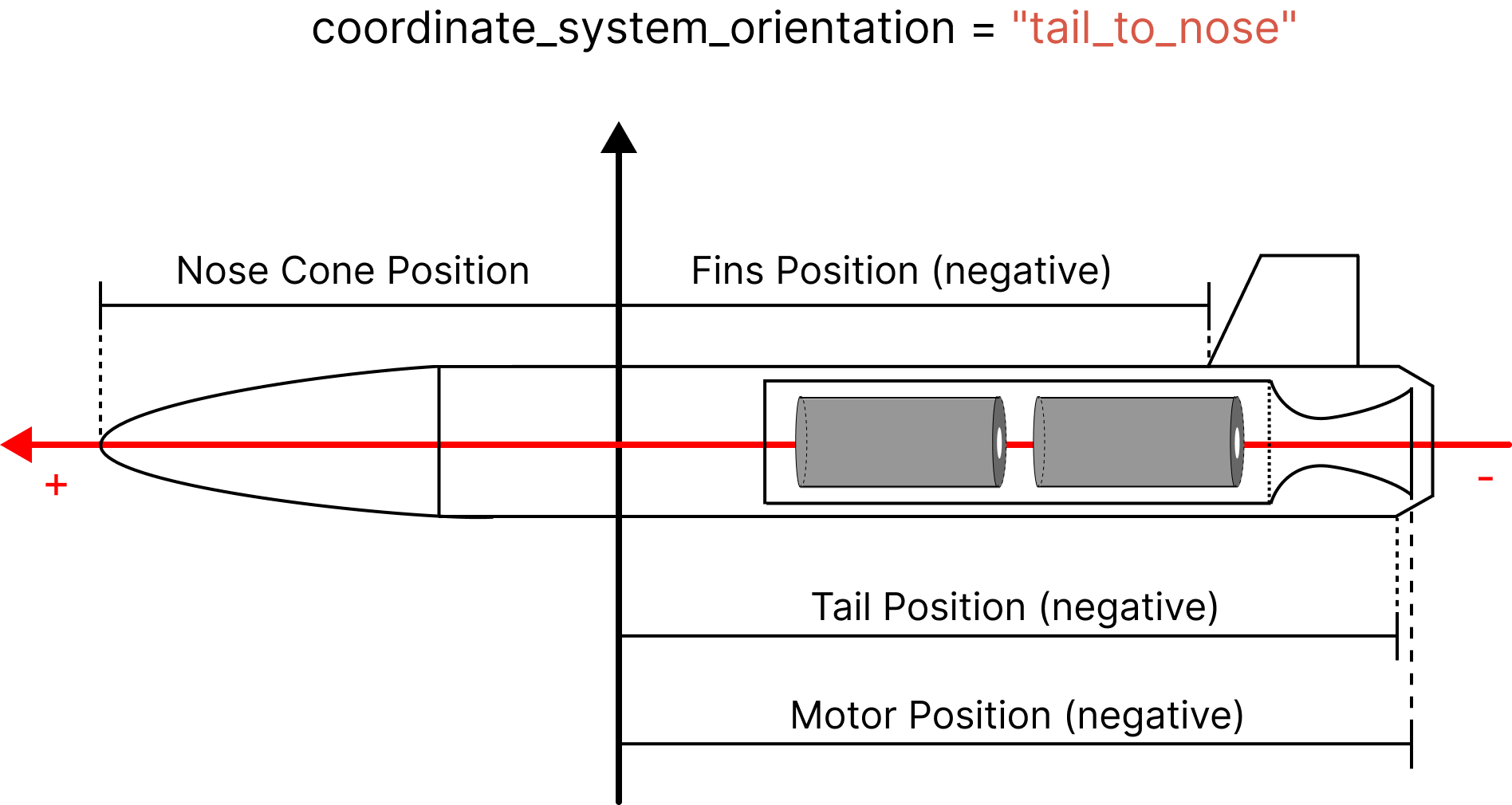
When adding an aerodynamic surface (i.e. nose cone, fins and tail) or a motor to a rocket you must specify the position of the aerodynamic surface. Here is an image showing the different positions that must be specified:
Important
All positions are relative to the coordinate system origin.
Motor position is relative to the motor’s coordinate system origin. In the above image, the motor’s coordinate system origin is at the nozzle exit area. See Motors for more information.
Nose cone position is relative to its tip.
Fins position is relative to the point belonging to the root chord which is highest in the rocket coordinate system (i.e. the point closest to the nose cone).
Tail position is relative to the point belonging to the tail which is highest in the rocket coordinate system (i.e. the point closest to the nose cone).
With the position known, adding the aerodynamic surfaces and motor to the rocket
is done using the add methods. These methods take several parameters, but
here we simplify the explanation by only showing the position related parameters.
rocket.add_motor(..., position=motor_position)
rocket.add_nose(..., position=nose_position)
rocket.add_trapezoidal_fins(..., position=fins_position)
rocket.add_tail(..., position=tail_position)
See also
You can find more information about the add methods in:
Setting Rail Buttons#
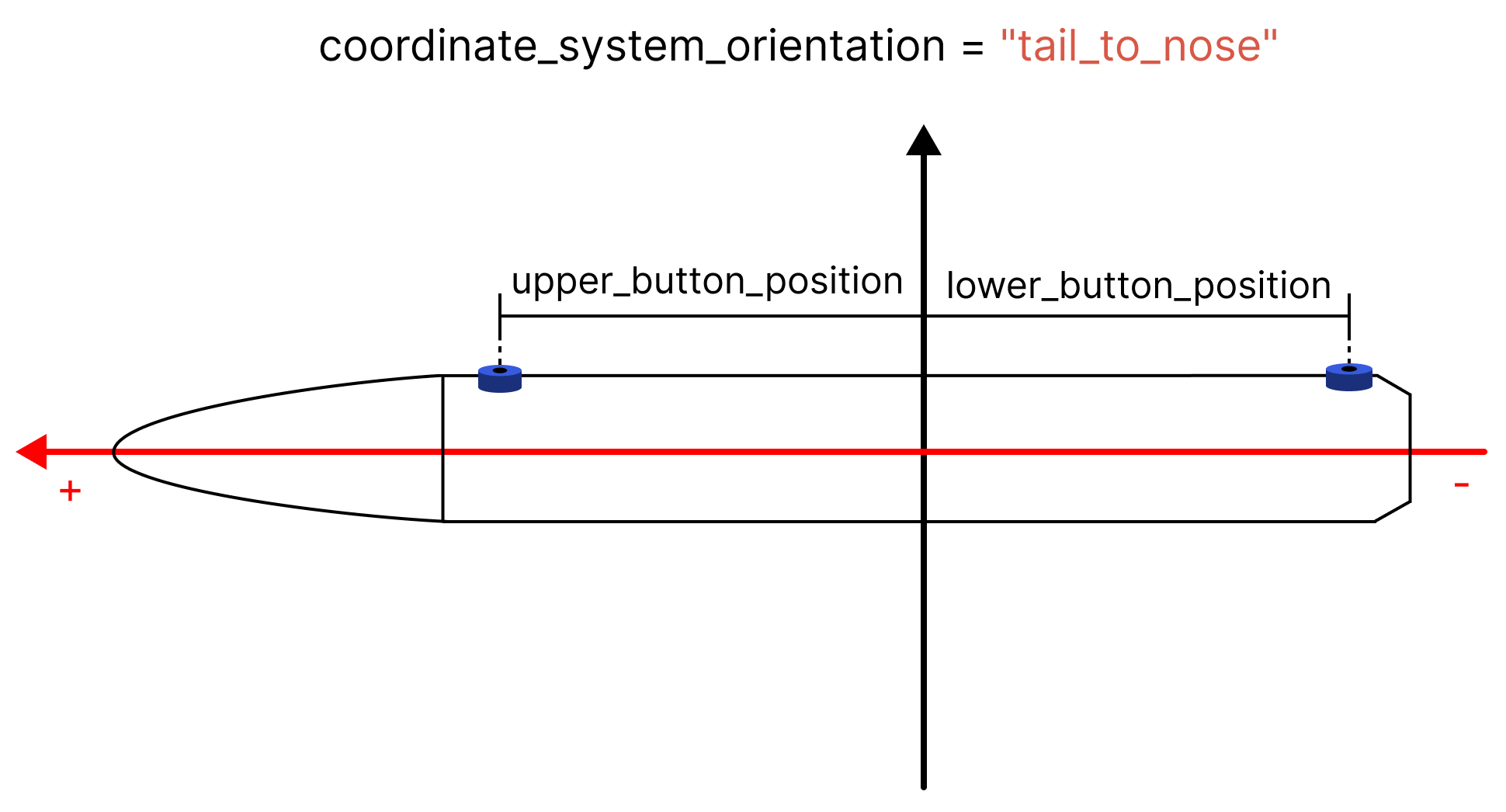
When setting the launch rail guides, you must specify the position of the upper and lower rail buttons. Here is an image showing the different positions that must be specified:
Important
All positions are relative to the coordinate system origin.
upper_button_positionis relative to the point belonging to the rail button which is closest to the tip of the rocket.lower_button_positionposition is relative to the point belonging to the rail button which is furthest from the tip of the rocket.If the rocket has more than two rail buttons, the position any button besides the upper and lower buttons is not necessary.
See also
Motors#
When defining a motor, a few position related parameters are required:
nozzle_position: The position of the nozzle exit area, relative to the coordinate system origin.grains_center_of_mass_position: The position of the center of mass of the grains, relative to the coordinate system origin. This parameter is not present in theLiquidMotorclass.center_of_dry_mass_position: The position of the center of mass of the dry mass, relative to the coordinate system origin.coordinate_system_orientation: The orientation of the coordinate system. Can either be “nozzle_to_combustion_chamber” or “combustion_chamber_to_nozzle”.
See also
You can find more information about these parameters in each of the motor classes constructors:
Here we will go through a few examples of how to specify the coordinate system origin and orientation.
Example with Origin at Arbitrary Point#
The coordinate system origin can be at any point.
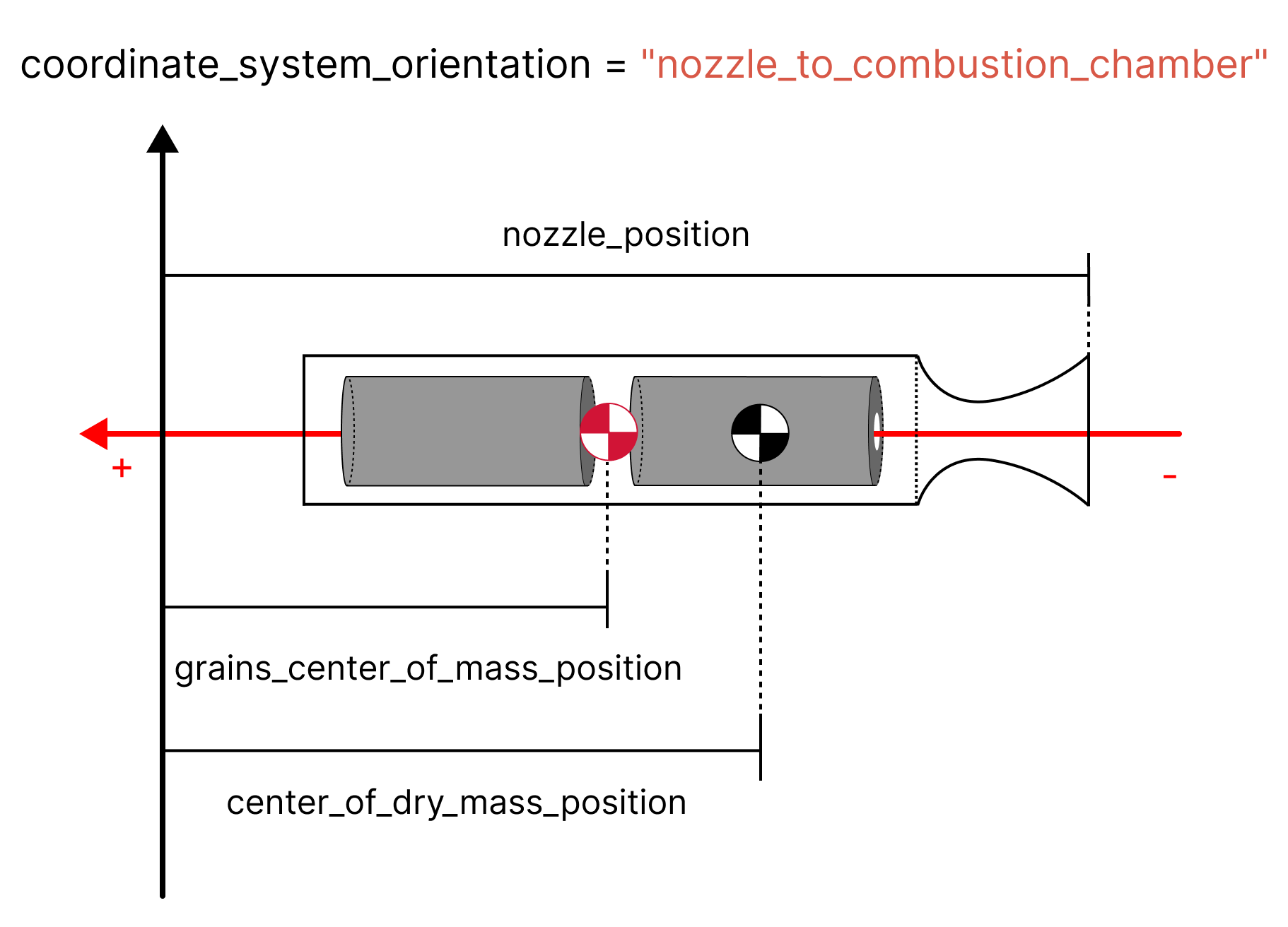
Here is an explanatory image of a motor with the coordinate system origin at
an arbitrary point and the
coordinate_system_orientation = nozzle_to_combustion_chamber:
Note
Liquid motors do not have the grains_center_of_mass_position parameter.
Note
In this case:
nozzle_positionis negative.grains_center_of_mass_positionis negative.center_of_dry_mass_positionis negative.
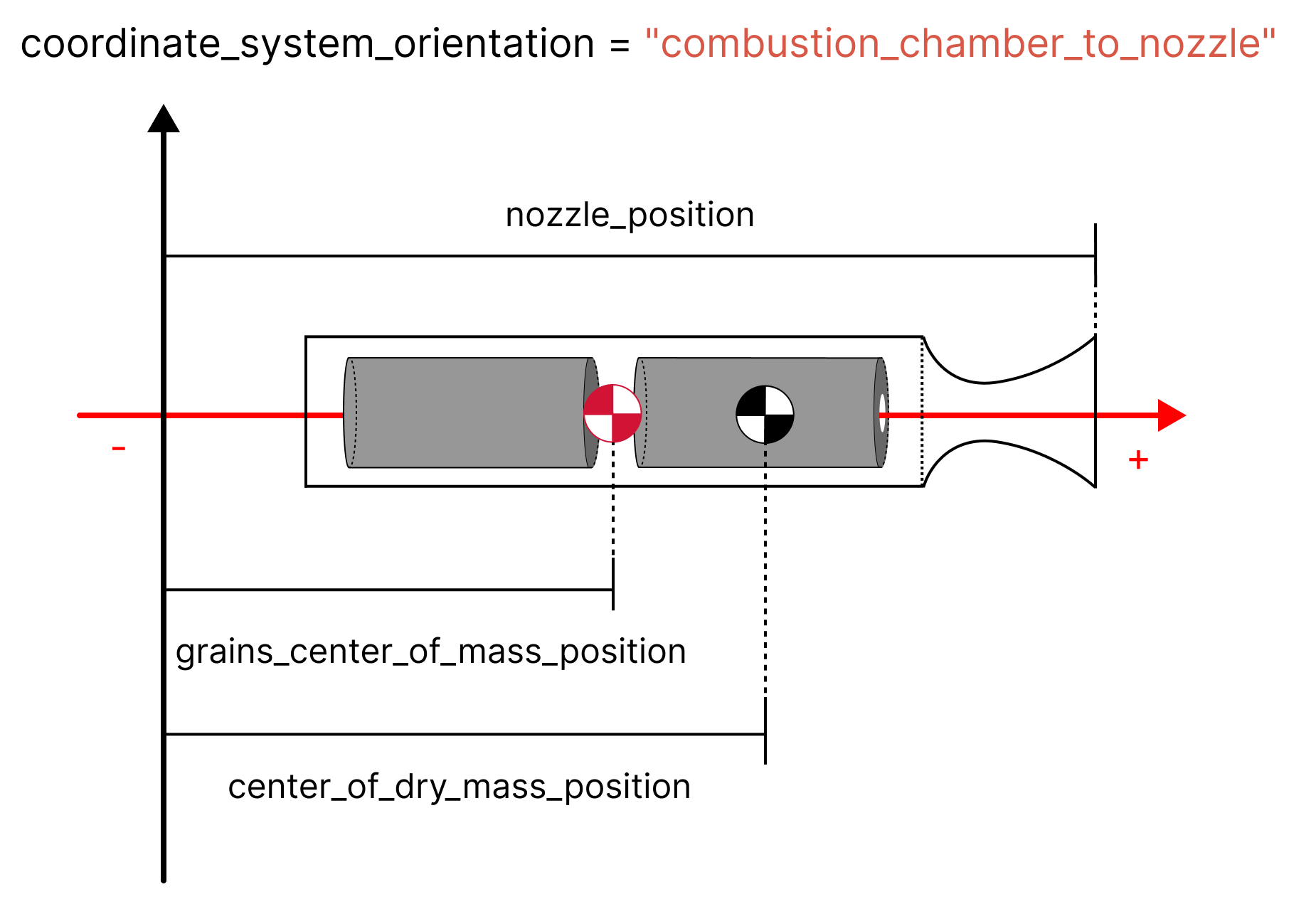
And with coordinate_system_orientation = combustion_chamber_to_nozzle:
Note
In this case:
nozzle_positionis positive.grains_center_of_mass_positionis positive.center_of_dry_mass_positionis positive.
Important
The coordinate system origin is the point where the axes intersect. This point is not explicitly specified and can be chosen by the user. All positions given by the user must be relative to this point.
The coordinate system origin does not need to be outside the motor. It can be inside the motor.
Example with Origin at the Nozzle Outlet#
A more useful situation for motors is to have the coordinate system origin at
the nozzle outlet. Here is an explanatory image of a motor with the coordinate
system origin at the nozzle outlet and
coordinate_system_orientation = nozzle_to_combustion_chamber:
Important
The coordinate system origin is at the outlet of the nozzle. This point is not explicitly specified and can be chosen by the user. All positions given by the user must be relative to this point.
Since the coordinate system origin is at the nozzle’s outlet, the position of the nozzle is zero.
We are using the
nozzle_to_combustion_chambercoordinate system orientation. This means thatcenter_of_mass_without_positionandgrains_center_of_mass_positionare positive.
Adding Tanks#
When adding a tank to a motor, the coordinate system used in the motor must be the same as the one used to define the tank position.
The tank position is defined as the position of the geometrical center of the tank, relative to the motor’s coordinate system origin.
Here is an explanatory image of a motor with a tank and the coordinate system
origin at the nozzle outlet and
coordinate_system_orientation = nozzle_to_combustion_chamber:
Caution
The center_of_dry_mass_position is given considering the combustion
chamber and all the tanks of the motor without propellant.
With a Tank Object defined and its position known
(as shown in the above figure), the tank can be added to the motor using the
add_tank method.
motor.add_tank(tank, position)
See also
You can find more information about the add_tank methods in: