Deployable Payload#
Here we try to demonstrate how to use RocketPy to simulate a flight of a rocket that presents a deployable payload.
Initializations for Google Colab#
To run this notebook, we will need:
RocketPy
netCDF4 (to get weather forecasts)
Data files (we will download RocketPy’s data from github)
Therefore, let’s run the following lines of code:
[ ]:
!pip install rocketpy netCDF4
!curl -o NACA0012-radians.csv https://raw.githubusercontent.com/RocketPy-Team/RocketPy/master/data/calisto/NACA0012-radians.csv
!curl -o Cesaroni_M1670.eng https://raw.githubusercontent.com/RocketPy-Team/RocketPy/master/data/motors/Cesaroni_M1670.eng
!curl -o powerOffDragCurve.csv https://raw.githubusercontent.com/RocketPy-Team/RocketPy/master/data/calisto/powerOffDragCurve.csv
!curl -o powerOnDragCurve.csv https://raw.githubusercontent.com/RocketPy-Team/RocketPy/master/data/calisto/powerOnDragCurve.csv
Simulation#
Now we can start!
Here we go through a simplified rocket trajectory simulation to get you started. Let’s start by importing the rocketpy module.
[1]:
from rocketpy import Environment, SolidMotor, Rocket, Flight
If you are using a version of Jupyter Notebooks, it is recommended to run the following lines of code to make plots that will be shown later interactive and/or higher quality.
[2]:
%matplotlib inline
Setting Up a Simulation#
Creating an Environment for Spaceport America#
[3]:
env = Environment(latitude=32.990254, longitude=-106.974998, elevation=1400)
To get weather data from the GFS forecast, available online, we run the following lines. See Environment Class Usage for more information on how to use the Environment class.
[4]:
import datetime
tomorrow = datetime.date.today() + datetime.timedelta(days=1)
env.set_date(
(tomorrow.year, tomorrow.month, tomorrow.day, 12)
) # Hour given in UTC time
env.set_atmospheric_model(type="Forecast", file="GFS")
env.max_expected_height = 8000
[5]:
env.info()
Gravity Details
Acceleration of Gravity at Lauch Site: 9.79111266229703 m/s²
Launch Site Details
Launch Date: 2023-08-08 12:00:00 UTC
Launch Site Latitude: 32.99025°
Launch Site Longitude: -106.97500°
Reference Datum: SIRGAS2000
Launch Site UTM coordinates: 315468.64 W 3651938.65 N
Launch Site UTM zone: 13S
Launch Site Surface Elevation: 1471.5 m
Atmospheric Model Details
Atmospheric Model Type: Forecast
Forecast Maximum Height: 8.000 km
Forecast Time Period: From 2023-08-07 18:00:00 to 2023-08-23 18:00:00 UTC
Forecast Hour Interval: 3 hrs
Forecast Latitude Range: From -90.0 ° To 90.0 °
Forecast Longitude Range: From 0.0 ° To 359.75 °
Surface Atmospheric Conditions
Surface Wind Speed: 2.90 m/s
Surface Wind Direction: 347.21°
Surface Wind Heading: 167.21°
Surface Pressure: 855.98 hPa
Surface Temperature: 296.24 K
Surface Air Density: 1.007 kg/m³
Surface Speed of Sound: 345.03 m/s
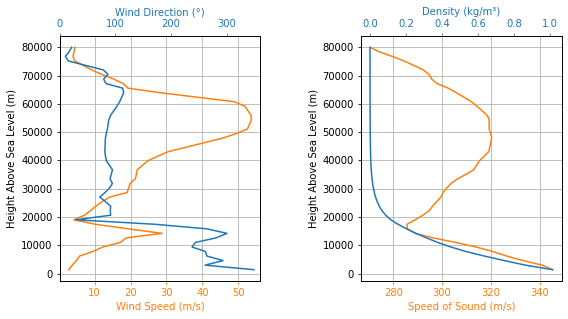
Atmospheric Model Plots
Creating a Motor#
A solid rocket motor is used in this case.
[6]:
Pro75M1670 = SolidMotor(
thrust_source="Cesaroni_M1670.eng",
dry_mass=1.815,
dry_inertia=(0.125, 0.125, 0.002),
nozzle_radius=33 / 1000,
grain_number=5,
grain_density=1815,
grain_outer_radius=33 / 1000,
grain_initial_inner_radius=15 / 1000,
grain_initial_height=120 / 1000,
grain_separation=5 / 1000,
grains_center_of_mass_position=0.397,
center_of_dry_mass_position=0.317,
nozzle_position=0,
burn_time=3.9,
throat_radius=11 / 1000,
coordinate_system_orientation="nozzle_to_combustion_chamber",
)
[7]:
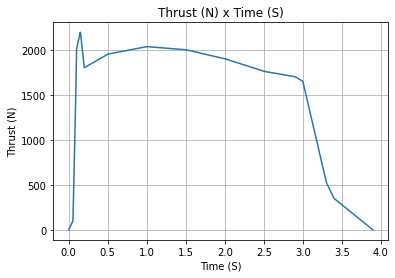
Pro75M1670.info()
Nozzle Details
Nozzle Radius: 0.033 m
Nozzle Throat Radius: 0.011 m
Grain Details
Number of Grains: 5
Grain Spacing: 0.005 m
Grain Density: 1815 kg/m3
Grain Outer Radius: 0.033 m
Grain Inner Radius: 0.015 m
Grain Height: 0.12 m
Grain Volume: 0.000 m3
Grain Mass: 0.591 kg
Motor Details
Total Burning Time: 3.9 s
Total Propellant Mass: 2.956 kg
Average Propellant Exhaust Velocity: 2038.745 m/s
Average Thrust: 1545.218 N
Maximum Thrust: 2200.0 N at 0.15 s after ignition.
Total Impulse: 6026.350 Ns
Simulating the First Flight Stage#
Let’s start to simulate our rocket’s flight. We will use the Environment and Motor objects we created before.
We will assume that the payload is ejected at apogee, however, this can be modified if needed.
We start by defining the value of each relevant mass, ensuring they are correct before continuing.
[8]:
# 14.426 is the mass of the rocket including the payload but without the motor
payload_mass = 4.5 # in kg
rocket_mass = 14.426 - payload_mass # in kg
print(
"Rocket Mass Without Motor: {:.4} kg (with Payload)".format(
rocket_mass + payload_mass
)
)
print("Loaded Motor Mass: {:.4} kg".format(Pro75M1670.total_mass(0)))
print("Payload Mass: {:.4} kg".format(payload_mass))
print(
"Fully loaded Rocket Mass: {:.4} kg".format(
rocket_mass + Pro75M1670.total_mass(0) + payload_mass
)
)
Rocket Mass Without Motor: 14.43 kg (with Payload)
Loaded Motor Mass: 4.771 kg
Payload Mass: 4.5 kg
Fully loaded Rocket Mass: 19.2 kg
Then we define our rocket.
[9]:
rocket_with_payload = Rocket(
radius=127 / 2000,
mass=rocket_mass + rocket_mass,
inertia=(6.321, 6.321, 0.034),
power_off_drag="powerOffDragCurve.csv",
power_on_drag="powerOnDragCurve.csv",
center_of_mass_without_motor=0,
coordinate_system_orientation="tail_to_nose",
)
rocket_with_payload.add_motor(Pro75M1670, position=-1.255)
rocket_with_payload.set_rail_buttons(
upper_button_position=0.0818,
lower_button_position=-0.618,
angular_position=45,
)
rocket_with_payload.add_nose(length=0.55829, kind="von karman", position=1.278)
rocket_with_payload.add_trapezoidal_fins(
n=4,
root_chord=0.120,
tip_chord=0.060,
span=0.110,
position=-1.04956,
cant_angle=0.5,
airfoil=("NACA0012-radians.csv", "radians"),
)
rocket_with_payload.add_tail(
top_radius=0.0635, bottom_radius=0.0435, length=0.060, position=-1.194656
)
[9]:
<rocketpy.AeroSurface.Tail at 0x19bb7e527a0>
[10]:
rocket_with_payload.info()
Inertia Details
Rocket Mass: 19.852 kg
Rocket Dry Mass: 21.667 kg (With Motor)
Rocket Mass: 24.623 kg (With Propellant)
Rocket Inertia (with motor, but without propellant) 11: 7.909 kg*m2
Rocket Inertia (with motor, but without propellant) 22: 7.909 kg*m2
Rocket Inertia (with motor, but without propellant) 33: 0.036 kg*m2
Rocket Inertia (with motor, but without propellant) 12: 0.000 kg*m2
Rocket Inertia (with motor, but without propellant) 13: 0.000 kg*m2
Rocket Inertia (with motor, but without propellant) 23: 0.000 kg*m2
Geometrical Parameters
Rocket Maximum Radius: 0.0635 m
Rocket Frontal Area: 0.012668 m2
Rocket Distances
Rocket Center of Dry Mass - Center of Mass withour Motor: 0.079 m
Rocket Center of Dry Mass - Nozzle Exit Distance: 1.176 m
Rocket Center of Dry Mass - Center of Propellant Mass: 0.779 m
Rocket Center of Mass - Rocket Loaded Center of Mass: 0.094 m
Aerodynamics Lift Coefficient Derivatives
Nosecone Lift Coefficient Derivative: 2.000/rad
Fins Lift Coefficient Derivative: 6.280/rad
Tail Lift Coefficient Derivative: -1.061/rad
Aerodynamics Center of Pressure
Nosecone Center of Pressure to CM: 0.999 m
Fins Center of Pressure to CM: -1.100 m
Tail Center of Pressure to CM: -1.223 m
Distance - Center of Pressure to Center of Dry Mass: 0.328 m
Initial Static Margin: 2.582 c
Final Static Margin: 3.319 c
Finally we create the flight simulation of this rocket, stopping at apogee
[11]:
flight_with_payload = Flight(
rocket=rocket_with_payload,
environment=env,
rail_length=5.2,
inclination=85,
heading=25,
terminate_on_apogee=True,
name="Rocket Flight With Payload",
)
Start the Second Flight Stage#
Now we will simulate the second flight stage, which is the landing phase of our Rocket. Here we will consider that the payload was ejected at the apogee of the first stage. Therefore we should be careful with the value of its mass.
[12]:
rocket_without_payload = Rocket(
radius=127 / 2000,
mass=rocket_mass,
inertia=(6.321, 6.321, 0.034),
power_off_drag="powerOffDragCurve.csv",
power_on_drag="powerOnDragCurve.csv",
center_of_mass_without_motor=0,
coordinate_system_orientation="tail_to_nose",
)
# Define Parachutes for the rocket
Main = rocket_without_payload.add_parachute(
"Main",
cd_s=7.2,
trigger=800,
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
Drogue = rocket_without_payload.add_parachute(
"Drogue",
cd_s=0.72,
trigger="apogee",
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
[13]:
rocket_without_payload.info()
Inertia Details
Rocket Mass: 9.926 kg
Rocket Dry Mass: 9.926 kg (With Motor)
Rocket Mass: 9.926 kg (With Propellant)
Rocket Inertia (with motor, but without propellant) 11: 6.321 kg*m2
Rocket Inertia (with motor, but without propellant) 22: 6.321 kg*m2
Rocket Inertia (with motor, but without propellant) 33: 0.034 kg*m2
Rocket Inertia (with motor, but without propellant) 12: 0.000 kg*m2
Rocket Inertia (with motor, but without propellant) 13: 0.000 kg*m2
Rocket Inertia (with motor, but without propellant) 23: 0.000 kg*m2
Geometrical Parameters
Rocket Maximum Radius: 0.0635 m
Rocket Frontal Area: 0.012668 m2
Rocket Distances
Rocket Center of Dry Mass - Center of Mass withour Motor: 0.000 m
Rocket Center of Dry Mass - Nozzle Exit Distance: 0.000 m
Rocket Center of Dry Mass - Center of Propellant Mass: 0.000 m
Rocket Center of Mass - Rocket Loaded Center of Mass: 0.000 m
Aerodynamics Lift Coefficient Derivatives
Aerodynamics Center of Pressure
Distance - Center of Pressure to Center of Dry Mass: 0.000 m
Initial Static Margin: 0.000 c
Final Static Margin: 0.000 c
Parachute Details
Parachute Main with a cd_s of 7.2000 m2
Ejection signal trigger: triggerfunc
Ejection system refresh rate: 105.000 Hz
Time between ejection signal is triggered and the parachute is fully opened: 1.5 s
Parachute Details
Parachute Drogue with a cd_s of 0.7200 m2
Ejection signal trigger: triggerfunc
Ejection system refresh rate: 105.000 Hz
Time between ejection signal is triggered and the parachute is fully opened: 1.5 s
The line initial_solution=flight_with_payload will make the simulation start from the end of the first stage.
This will simulate our rocket with its payload ejected, after reaching apogee.
[14]:
flight_without_payload = Flight(
rocket=rocket_without_payload,
environment=env,
rail_length=5.2, # does not matter since the flight is starting at apogee
inclination=0,
heading=0,
initial_solution=flight_with_payload,
name="Rocket Flight Without Payload",
)
Simulating the Third Flight Stage - Payload Flight#
Here we will simulate the payload flight, which is the third flight stage of our Rocket. The Payload will be ejected at the apogee of the first stage. Here, it will be modeled as a “dummy” rocket, which does not have any aerodynamic surfaces to stabilize it, nor a motor that ignites. It does, however, have parachutes.
[15]:
# Define the "Payload Rocket"
payload_rocket = Rocket(
radius=127 / 2000,
mass=payload_mass,
inertia=(0.1, 0.1, 0.001),
power_off_drag=0.5,
power_on_drag=0.5,
center_of_mass_without_motor=0,
)
payload_drogue = payload_rocket.add_parachute(
"Drogue",
cd_s=0.35,
trigger="apogee",
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
payload_main = payload_rocket.add_parachute(
"Main",
cd_s=4.0,
trigger=800,
sampling_rate=105,
lag=1.5,
noise=(0, 8.3, 0.5),
)
The magic line initialSolution=RocketFlight1 will make the simulation start from the end of the first stage.
[16]:
payload_flight = Flight(
rocket=payload_rocket,
environment=env,
rail_length=5.2, # does not matter since the flight is starting at apogee
inclination=0,
heading=0,
initial_solution=flight_with_payload,
name="PayloadFlight",
)
Plotting Everything together#
We will invoke a method from RocketPy’s utilities class in order to visualize the trajectory.
[17]:
from rocketpy.plots.compare import CompareFlights
Then we create the comparison object, an instance of CompareFligths class
[18]:
comparison = CompareFlights(
[flight_with_payload, flight_without_payload, payload_flight]
)
And, finally, we are able to plot different aspects of the comparison object.
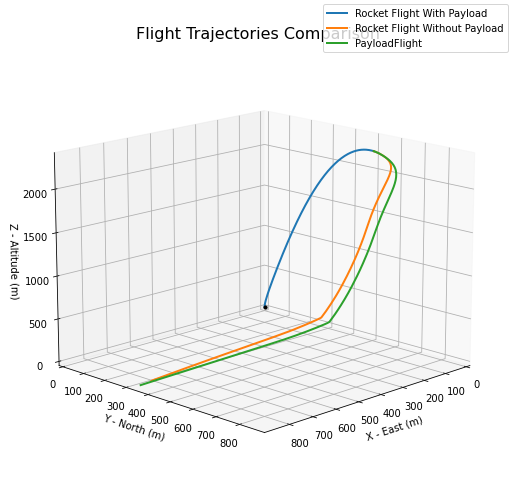
[19]:
comparison.trajectories_3d(legend=True)
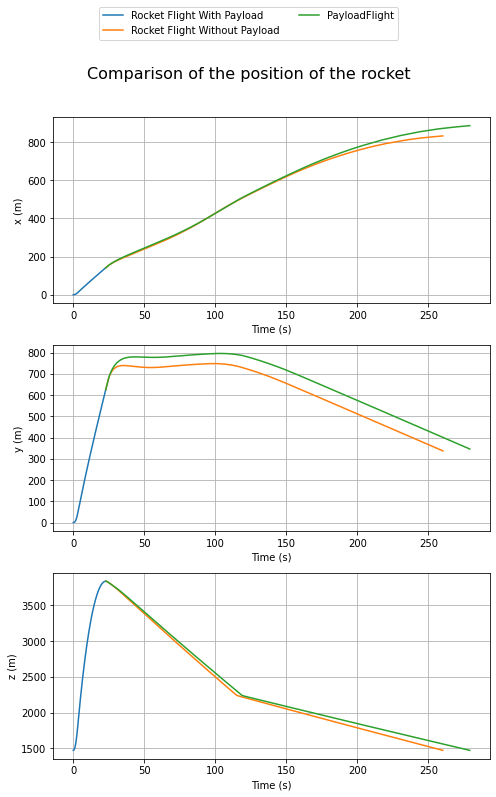
[20]:
comparison.positions()
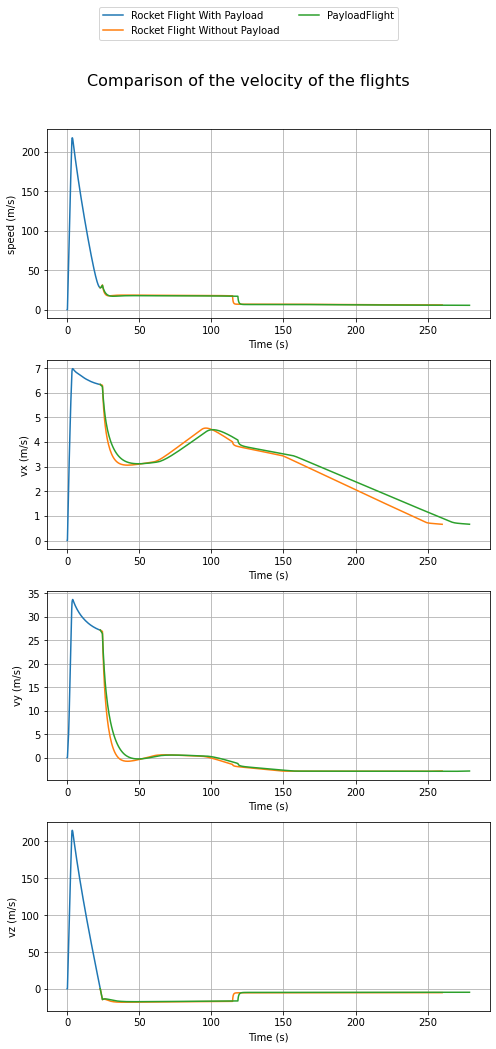
[21]:
comparison.velocities()
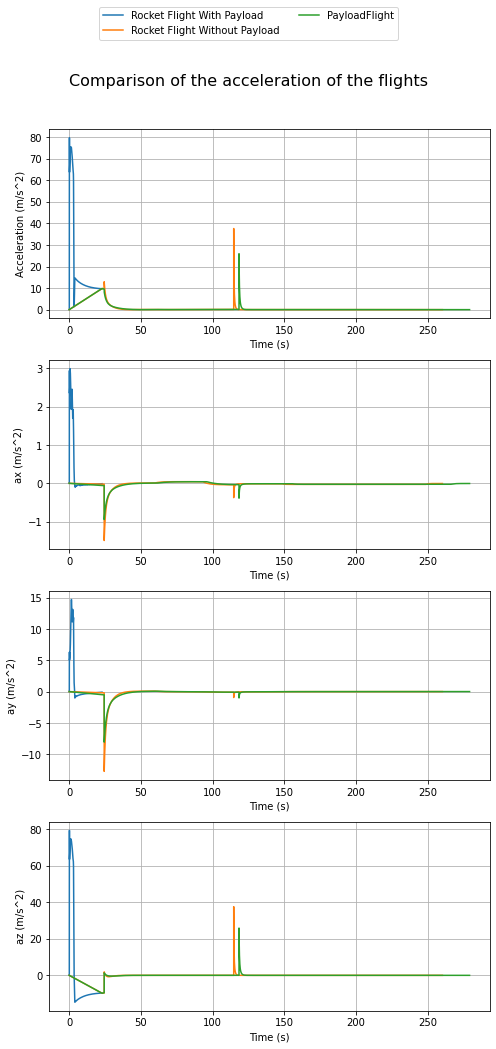
[22]:
comparison.accelerations()
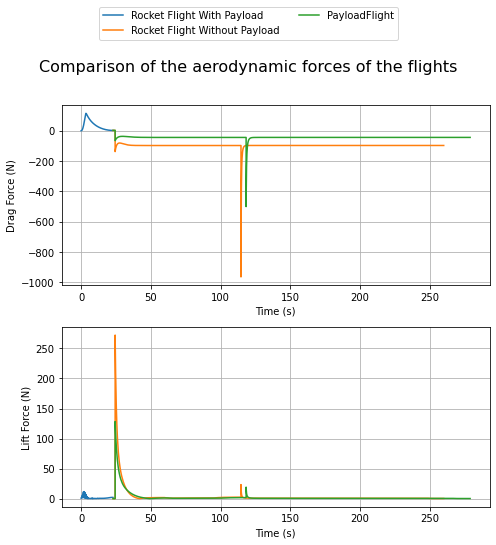
[23]:
comparison.aerodynamic_forces()
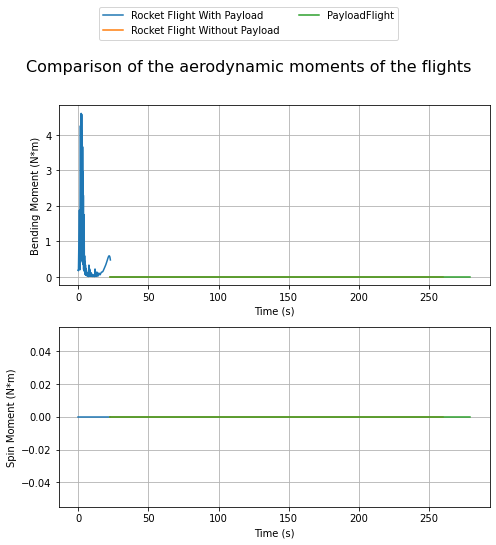
[24]:
comparison.aerodynamic_moments()
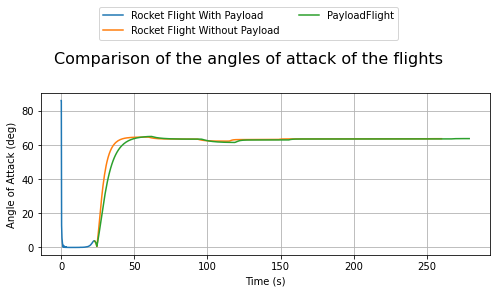
[25]:
comparison.angles_of_attack()